
Previous Projections in Garage and on Lawn





Jordan Wolfson: Colored Puppet


Planning and Preparing the Installation
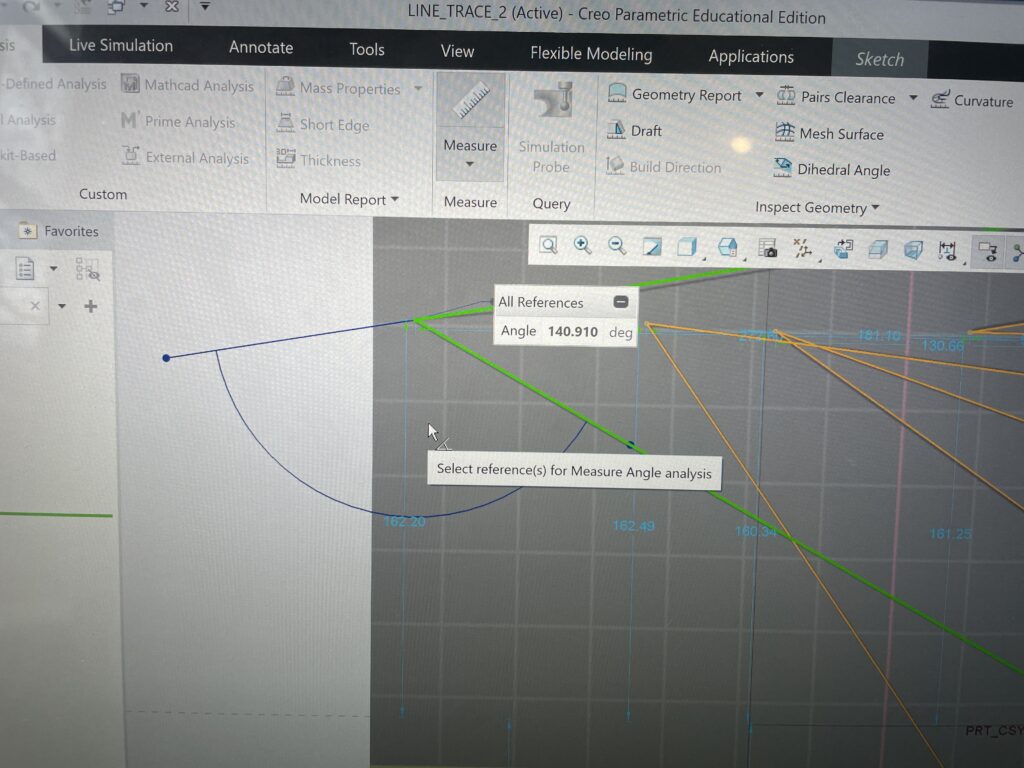
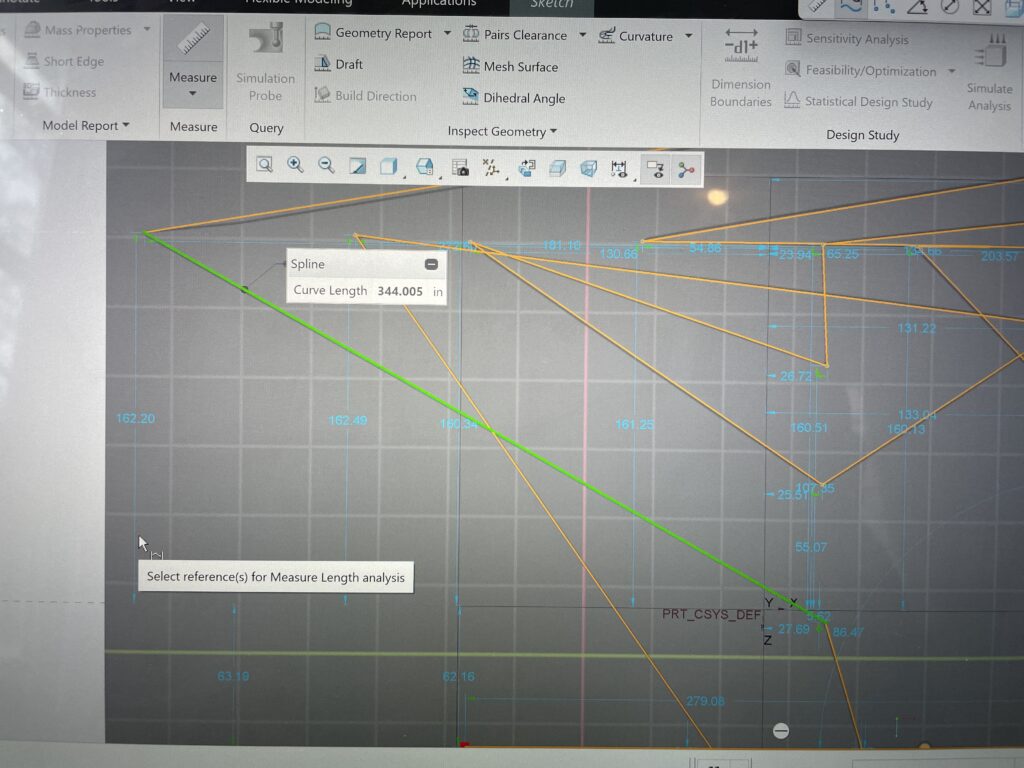
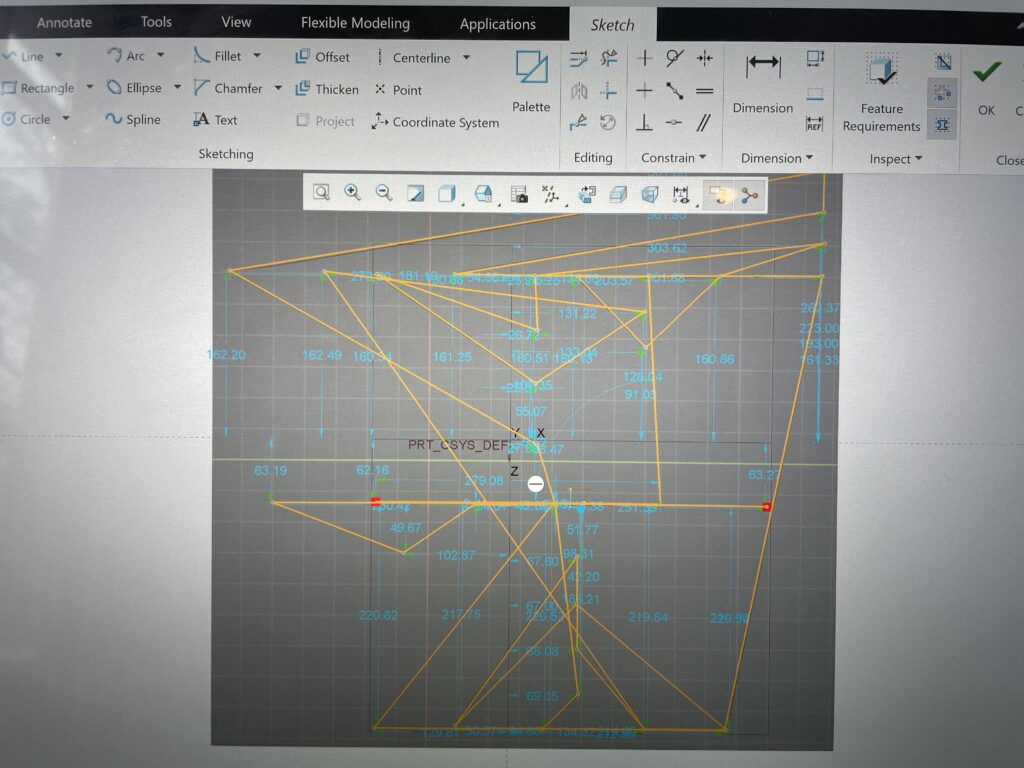
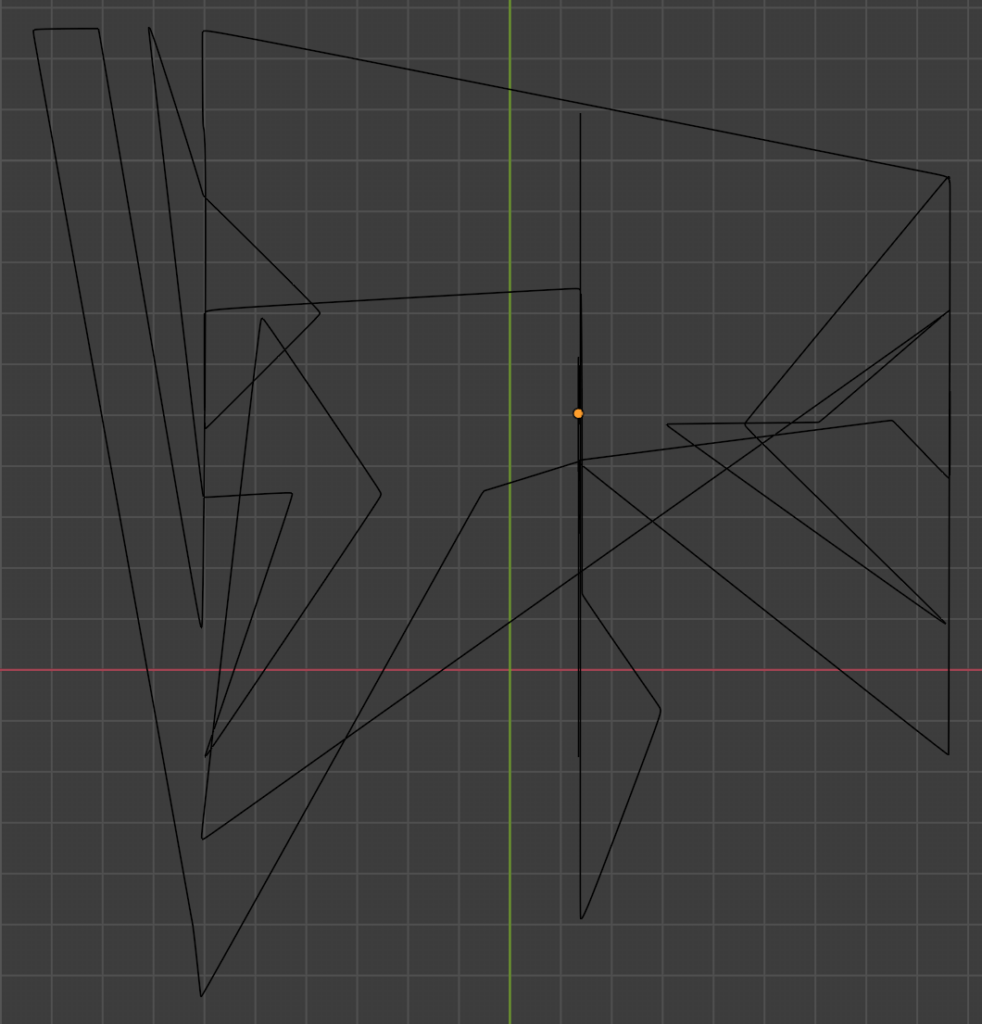
I begun by importing a top-down image, from Blender, of the ordered path left after the engine suspension plan (see next chapter) into Creo. Then, I used the “line” tool to accurately reconstruct the path, calculating various lengths and angles, giving me a sheet with “code” on it (below).
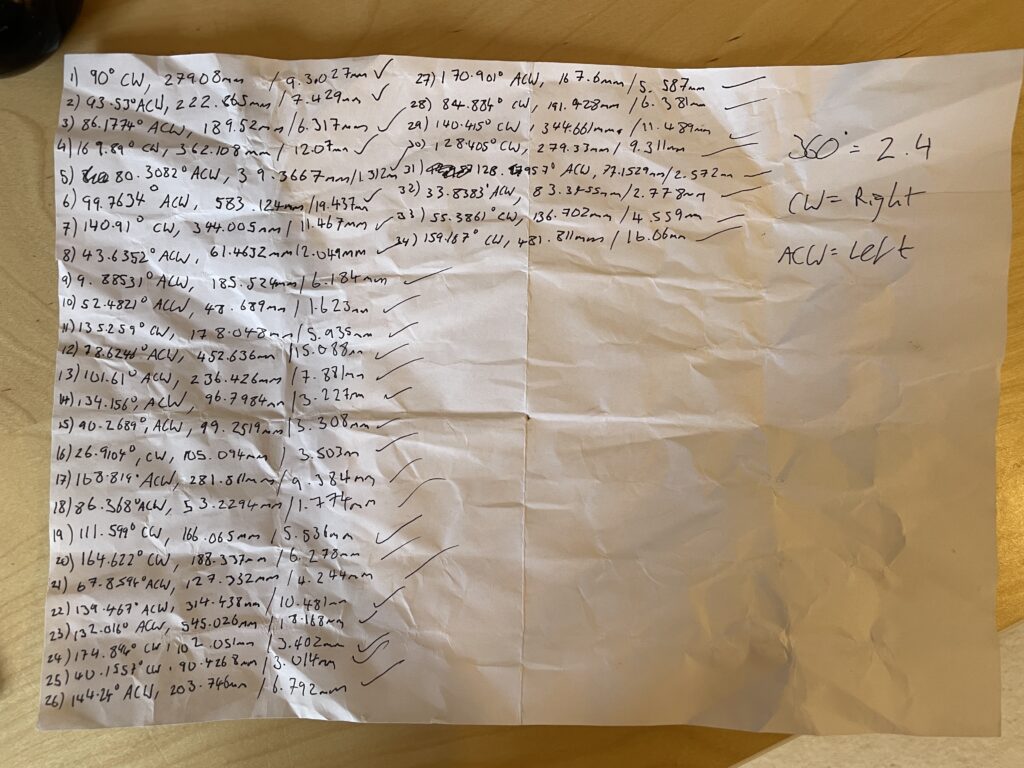
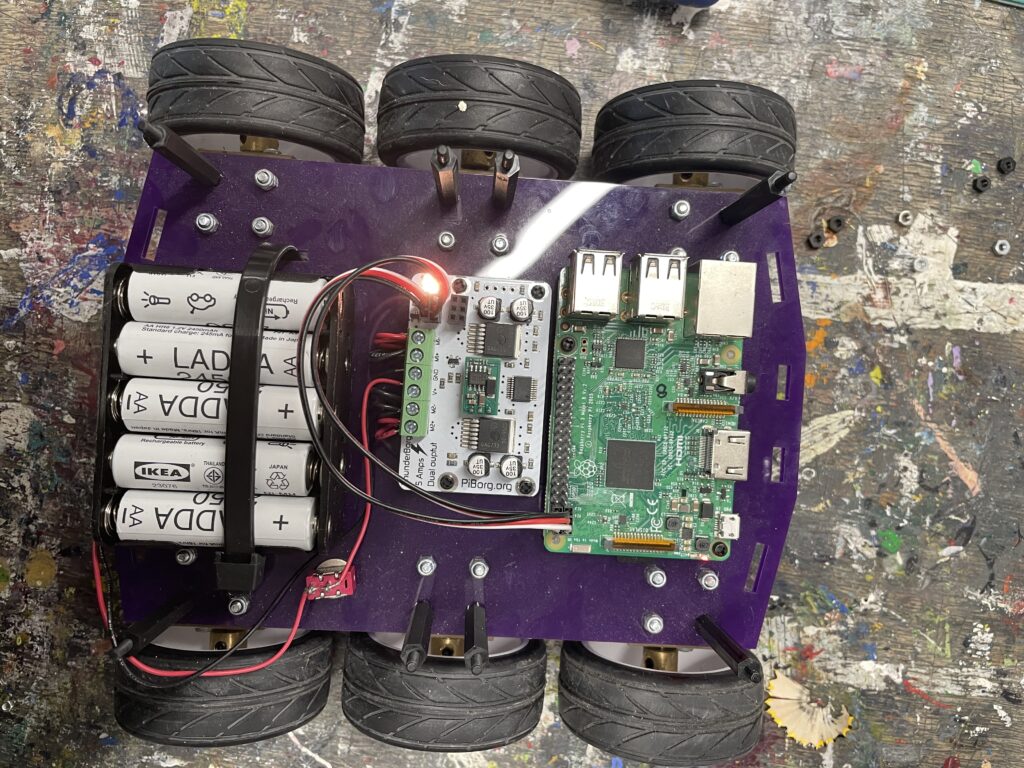
Using a basic, rapberry-pi operated robot I received from the Computer Science department in school, I began coding the path of the robot from the mathematical distances and angles found from analysing the path in Creo. “robot.right” meant turn clockwise whereas “robot.left” meant the opposite. “time”sleep” after an input such as “robot.forwards” told the machine for how long to carry that command out. All the numbers next to “time.sleep” are seconds. I worked out that the robot took 2.4 seconds to turn 360 degrees, therefore I knew, using ratios, how long it would take to rotate 120 degrees (0.8 seconds), for example. Following this structure for the entire, I managed to create a code.
After this, I screwed on a wireless projector to the top, found a large dark space, and filmed the robot moving within that space, following the above path, whilst projecting various videos onto the enclosing walls;